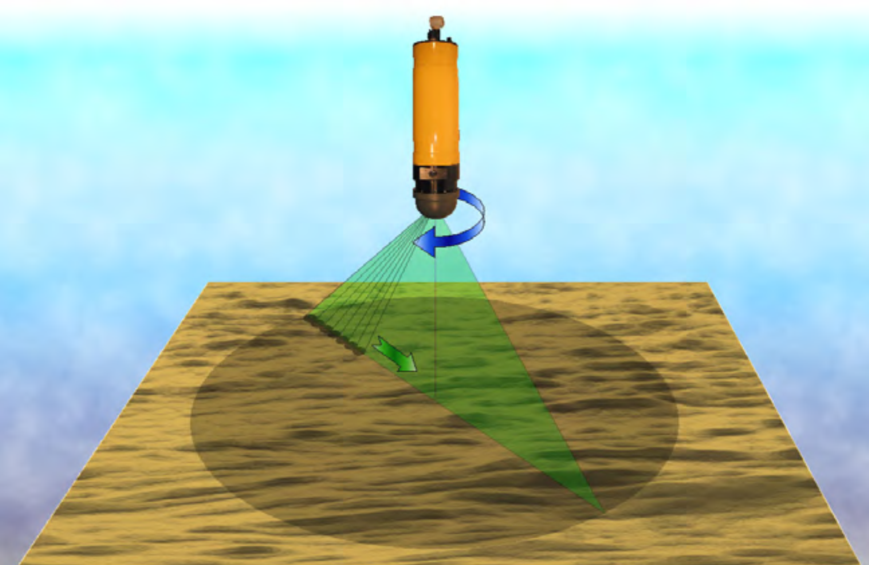
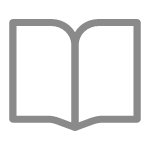
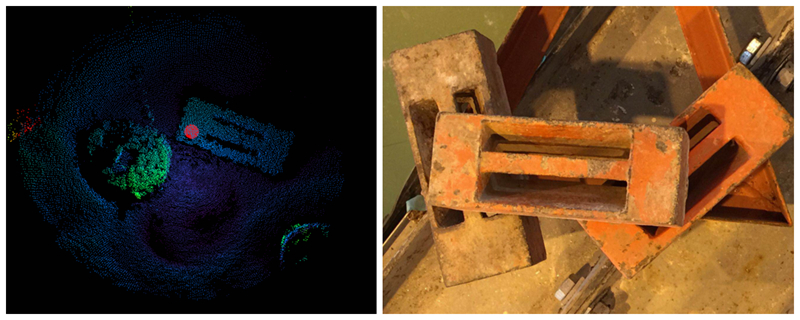
Model 2001 3D 微地貌成像声呐可生成水下地形,结构目标的高分辨率图像。对、河流中淤泥层进行量化计算和侵蚀淤积过程监测。工作状态下,水下声学首先进行水平宽度范围扫描,然后旋转一个很小的角度,再进行水平范围内扫描工作,以此方式一直扫描下去,直到完成传感器下方整个 360°覆盖区域内的扫描工作,如图所示:
Model 2001 型三维成像声呐包括式和在线自容式两种工作模式,而且声呐系统还可以选配电导率,温度,压力,横摇,纵摇等传感器,极大方便用户在进行海洋测绘的同时,进行多种物理海洋参数的采集。系统完整配置下可以进行原始数据到 ASCII 'XYZ'模式的转化,自容式下具备以太网口,可以将数据上传,而不需要打开压力舱。
水下压力舱通常会安装在水下支架等可以作为长期部署平台上,进行为期数周甚至是数月的长期观测,系统内置软件则会定期进行数据采集,并且保证系统处于节能模式。针对潮汐测量来说,系统可定制一个湿端开关,以便在传感器浸没到水中后就开启测量记录工作。系统软件具备多种可调用的程序,也可以显示原始数据以及'XYZ'格式的数据,在Windows 接口程序下,系统具备更好的操作性,大大节约了数据采集处理时间。
产品优势:
* 实时高精度三维数据采集
* 内置 CTD,横/ 纵摇传感器用来校准数据
* 支持 Windows98,ME,2000,NT,XP 等多种操作系统
* 原始数据存储到大容量硬盘上,以便进行后处理工作
* 高精度测量在线屏幕游标
* 多种操作方式:在线式,自容式等
* 无额外旋转部件
* 压力平衡声呐仓
Model 2001 3D 测量范围:
1MHz:20米 (标配)
750kHz:30米
500kHz:40米
可通过扫描波束角度调整测量范围。
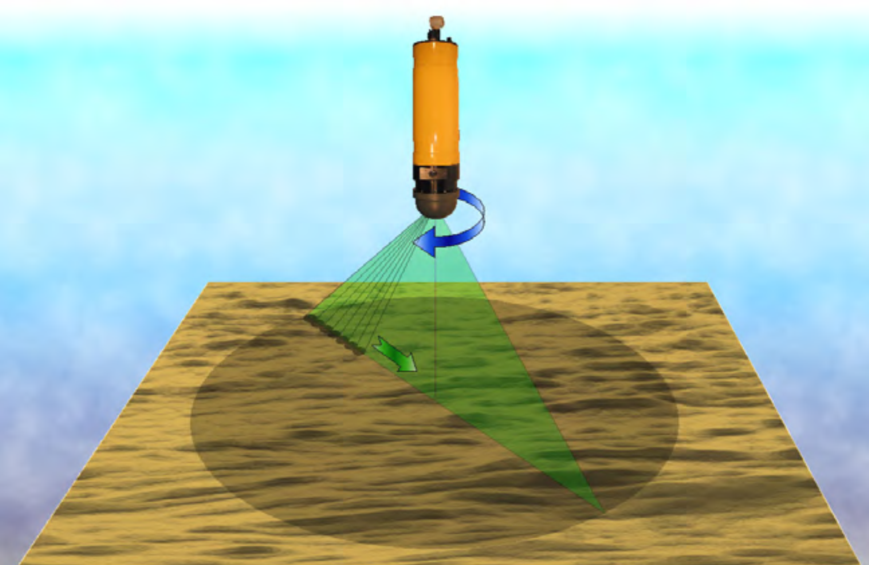
软件成图:
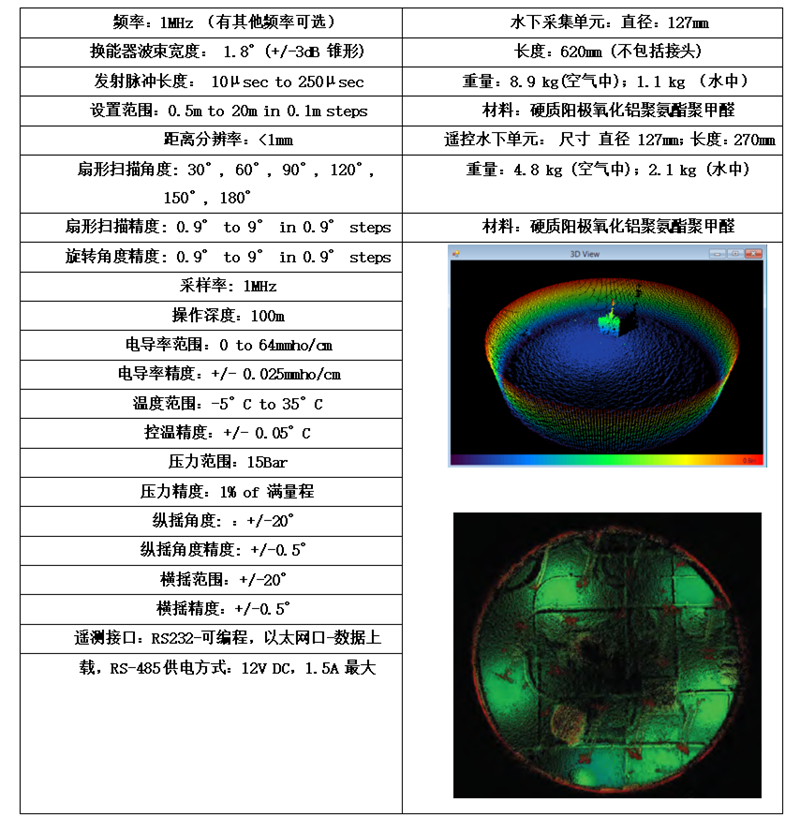
系统规格
原理与应用
Model 2001 三维声呐为短距离声呐海测领域提供了新的性能标杆,高频声学换能器首先以非常窄的波束在扇形平面上进行扫描,然后再旋转扫描直到完整的扫描完360°范围内声呐图像。当系统处于走航式模式下,会首先进行电导率,温度和压力的测量,然后以这些数据位标准计算当前水域的声速,以便将数据自动导入声纳成像和距离的算法中,极大提高了声纳图像的精度。横摇和纵摇传感器则实时将华能器头的姿态数据传到系统中,以便实时调整声呐头,极大提高了成像距离的准确度。系统还可以工作在‘分离式’模式下,可以用来对含有高危险物质的蓄水池或者河流湖泊中淤泥层进行量化计算和过程监测,成为一款非常具有技术竞争性的产品。
下图为声呐电子控制单元和声呐头:

声呐水下单元可以在‘分离式’模式下工作,也就是声呐头远离声纳电子控制单元的情况下工作,这样就可以在一些高危环境下进行数据采集,比如某些高辐射水域,通过脐带缆将电子控制单元与声呐头连接,并将声纳头搭载到 ROV 或则 AUV 上,进行高精度数据采集工作。不论是走航式还是分离式,系统都具备内置压力平衡仓,用来补偿声纳圆顶内密封油的热胀冷缩特性。
Model 2001 3D 微地貌成像声呐可生成水下地形,结构目标的高分辨率图像。对、河流中淤泥层进行量化计算和侵蚀淤积过程监测。工作状态下,水下声学首先进行水平宽度范围扫描,然后旋转一个很小的角度,再进行水平范围内扫描工作,以此方式一直扫描下去,直到完成传感器下方整个 360°覆盖区域内的扫描工作,如图所示:
Model 2001 型三维成像声呐包括式和在线自容式两种工作模式,而且声呐系统还可以选配电导率,温度,压力,横摇,纵摇等传感器,极大方便用户在进行海洋测绘的同时,进行多种物理海洋参数的采集。系统完整配置下可以进行原始数据到 ASCII 'XYZ'模式的转化,自容式下具备以太网口,可以将数据上传,而不需要打开压力舱。
水下压力舱通常会安装在水下支架等可以作为长期部署平台上,进行为期数周甚至是数月的长期观测,系统内置软件则会定期进行数据采集,并且保证系统处于节能模式。针对潮汐测量来说,系统可定制一个湿端开关,以便在传感器浸没到水中后就开启测量记录工作。系统软件具备多种可调用的程序,也可以显示原始数据以及'XYZ'格式的数据,在Windows 接口程序下,系统具备更好的操作性,大大节约了数据采集处理时间。
产品优势:
* 实时高精度三维数据采集
* 内置 CTD,横/ 纵摇传感器用来校准数据
* 支持 Windows98,ME,2000,NT,XP 等多种操作系统
* 原始数据存储到大容量硬盘上,以便进行后处理工作
* 高精度测量在线屏幕游标
* 多种操作方式:在线式,自容式等
* 无额外旋转部件
* 压力平衡声呐仓
Model 2001 3D 测量范围:
1MHz:20米 (标配)
750kHz:30米
500kHz:40米
可通过扫描波束角度调整测量范围。
软件成图:
系统规格
原理与应用
Model 2001 三维声呐为短距离声呐海测领域提供了新的性能标杆,高频声学换能器首先以非常窄的波束在扇形平面上进行扫描,然后再旋转扫描直到完整的扫描完360°范围内声呐图像。当系统处于走航式模式下,会首先进行电导率,温度和压力的测量,然后以这些数据位标准计算当前水域的声速,以便将数据自动导入声纳成像和距离的算法中,极大提高了声纳图像的精度。横摇和纵摇传感器则实时将华能器头的姿态数据传到系统中,以便实时调整声呐头,极大提高了成像距离的准确度。系统还可以工作在‘分离式’模式下,可以用来对含有高危险物质的蓄水池或者河流湖泊中淤泥层进行量化计算和过程监测,成为一款非常具有技术竞争性的产品。
下图为声呐电子控制单元和声呐头:
声呐水下单元可以在‘分离式’模式下工作,也就是声呐头远离声纳电子控制单元的情况下工作,这样就可以在一些高危环境下进行数据采集,比如某些高辐射水域,通过脐带缆将电子控制单元与声呐头连接,并将声纳头搭载到 ROV 或则 AUV 上,进行高精度数据采集工作。不论是走航式还是分离式,系统都具备内置压力平衡仓,用来补偿声纳圆顶内密封油的热胀冷缩特性。